

我们如何使用机器人具有“触觉意义”?
栏目:专题报道 发布时间:2025-06-22 11:09
 原始标题:我国家的科学研究小组成功产生了高分辨率触觉机器人仿生手
这个“手”很棒(探索第一行)
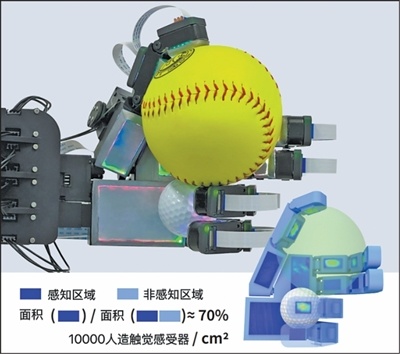
图显示了机器人理解区域的仿生图。 Zhao Zihan li yuyang
在北京通用人工智能研究所实验室中,机器人仿生手做了一项艰巨的任务:在用拇指和手握住瓶子时,用其他手指将高尔夫球拿走,然后将其精确地带到指定的位置。
在机器人领域,如何实现不影响运动运动的整个触觉范围总是一个困难的问题。 “它可以像一个人一样通过触觉反馈来精确工作。”北京通用人工智能研究所的研究人员刘tenguyu介绍了这是一只名为“ F-TAC手”的仿生手。它结合了高分辨率的触觉感知,占其棕榈表面面积的70%,实现了适应性第一次适合该人的E功能。
以前,这一结果由北京通用人工智能研究所,北京大学和英国伦敦大学皇后学院进行研究,已发表在“自然机器智能”中。
研究人的手功能是在体现智能和机器人研究中切割的领域。 Liu Tenguyu介绍了:“我们涉及两种功能:'触觉反馈'和“运动功能”时。
如何制作具有“触觉意义”的机器人? “这是我们第一次将17个视觉触觉传感器嵌入具有人类真正的手的机器人中。”研究人员Li Wanlin提出,机器人的模块化视觉触觉传感器主要由多色光资源,柔性硅涂层,严格的支持组成成员,迷你摄像机和传感器板。
记者选择了一支笔并按下机器人,并在背景中立即在计算机屏幕上显示确切的接触位置,压力分布和笔纹理。 “为了使所有传感器立即起作用,我们设计了同步系统的多相机同步。”研究人员Wang Meng介绍了:“传感器既是理解的要素,也是结构组成部分的要素,可以实现不间断的范围,而无需牺牲灵活性。”
人的手有27个骨头和34个肌肉,可以达到24个自由。研究人员李·博伦(Li Boren)提出,在控制方面,机器人仿生手使用绳索驱动方法,并使用五个肌腱绳将它们舔在手指的两侧,以控制五个手指的失真和膨胀。同时,关节内置在扭转弹簧结构中,以在肌腱绳为Rela时实现自动重置XED,可以达到15度的独立性和10个牛仔力的握力。
"We have developed an algorithm that generates human crawling techniques to solve this problem. The algorithm is based on a model of possibility and can produce crawling techniques that are very similar to people, coveringin the 19 common types of crawling in people. "Li Yuqing, an intern at the Beijing General Artificial Intelligence Institute and a doctor at the Peking University Institute of Artificial Intelligence, said.
Li Yuqing介绍了与没有大便反馈的系统相比,“ F-TAC手”面对旅行错误风险和对象碰撞的实施显示出显着的适应性优势,平均成功率从53.5%到100%。 “基于触觉的闭环反馈机制可以在不确定的环境(例如人)中保持良好而灵活的操作能力,这对于家庭机器人的实际应用至关重要,医疗和工业环境,”李阳说。
北京通用人工智能研究所院长,北京大学人工智能研究所的院长朱·宋简(Songchun)表示,这项研究的结果证实,对所有手的高分辨率感知都可以在不影响运动运动功能的情况下实现,为探索复杂策略探索复杂的智能智能的新研究道路开辟了新的研究路径。 “从广义上讲,我们的研究结果为丰富的感觉对智能行为发表评论的关键作用提供了有力的证据,并为超出纯计算方法以外的浮雕人工智能系统的开发创建了方向。”
原始标题:我国家的科学研究小组成功产生了高分辨率触觉机器人仿生手
这个“手”很棒(探索第一行)
图显示了机器人理解区域的仿生图。 Zhao Zihan li yuyang
在北京通用人工智能研究所实验室中,机器人仿生手做了一项艰巨的任务:在用拇指和手握住瓶子时,用其他手指将高尔夫球拿走,然后将其精确地带到指定的位置。
在机器人领域,如何实现不影响运动运动的整个触觉范围总是一个困难的问题。 “它可以像一个人一样通过触觉反馈来精确工作。”北京通用人工智能研究所的研究人员刘tenguyu介绍了这是一只名为“ F-TAC手”的仿生手。它结合了高分辨率的触觉感知,占其棕榈表面面积的70%,实现了适应性第一次适合该人的E功能。
以前,这一结果由北京通用人工智能研究所,北京大学和英国伦敦大学皇后学院进行研究,已发表在“自然机器智能”中。
研究人的手功能是在体现智能和机器人研究中切割的领域。 Liu Tenguyu介绍了:“我们涉及两种功能:'触觉反馈'和“运动功能”时。
如何制作具有“触觉意义”的机器人? “这是我们第一次将17个视觉触觉传感器嵌入具有人类真正的手的机器人中。”研究人员Li Wanlin提出,机器人的模块化视觉触觉传感器主要由多色光资源,柔性硅涂层,严格的支持组成成员,迷你摄像机和传感器板。
记者选择了一支笔并按下机器人,并在背景中立即在计算机屏幕上显示确切的接触位置,压力分布和笔纹理。 “为了使所有传感器立即起作用,我们设计了同步系统的多相机同步。”研究人员Wang Meng介绍了:“传感器既是理解的要素,也是结构组成部分的要素,可以实现不间断的范围,而无需牺牲灵活性。”
人的手有27个骨头和34个肌肉,可以达到24个自由。研究人员李·博伦(Li Boren)提出,在控制方面,机器人仿生手使用绳索驱动方法,并使用五个肌腱绳将它们舔在手指的两侧,以控制五个手指的失真和膨胀。同时,关节内置在扭转弹簧结构中,以在肌腱绳为Rela时实现自动重置XED,可以达到15度的独立性和10个牛仔力的握力。
"We have developed an algorithm that generates human crawling techniques to solve this problem. The algorithm is based on a model of possibility and can produce crawling techniques that are very similar to people, coveringin the 19 common types of crawling in people. "Li Yuqing, an intern at the Beijing General Artificial Intelligence Institute and a doctor at the Peking University Institute of Artificial Intelligence, said.
Li Yuqing介绍了与没有大便反馈的系统相比,“ F-TAC手”面对旅行错误风险和对象碰撞的实施显示出显着的适应性优势,平均成功率从53.5%到100%。 “基于触觉的闭环反馈机制可以在不确定的环境(例如人)中保持良好而灵活的操作能力,这对于家庭机器人的实际应用至关重要,医疗和工业环境,”李阳说。
北京通用人工智能研究所院长,北京大学人工智能研究所的院长朱·宋简(Songchun)表示,这项研究的结果证实,对所有手的高分辨率感知都可以在不影响运动运动功能的情况下实现,为探索复杂策略探索复杂的智能智能的新研究道路开辟了新的研究路径。 “从广义上讲,我们的研究结果为丰富的感觉对智能行为发表评论的关键作用提供了有力的证据,并为超出纯计算方法以外的浮雕人工智能系统的开发创建了方向。” 下一篇:没有了